Screenshot

–
어떤 데이터로 분석할까?
전자, 컴퓨터 분야의 국내 연구현황에 대한 다양한 분석을 해보기 위해, 현재 19개 국내 대학의 전자, 컴퓨터 관련학과에 소속된 현직 전임교수들의 연구내용을 수집하고 있습니다.
다음과 같은 대학들을 대상으로, 각 대학의 전자, 컴퓨터 관련 학과에 소속된 전임 교수들의 구글 스칼라에 공개된 데이터를 활용합니다.
- 경희대, 고려대, 광운대, 서강대, 서울대, 성균관대, 숭실대, 아주대, 연세대, 이화여대, 인하대, 중앙대, POSTECH, 한양대, 홍익대
- KAIST, GIST, DGIST, UNIST
2025년 7월 초에 1차 수집을 완료하여 약 1200여 명의 연구내용(약 180,000여 개의 논문, 특허 등)을 확보하였으며, 이후에도 지속적으로 모니터링하면서 연구자들을 계속 탐색하고 수집 대상 대학도 계속 늘려갈 예정입니다.
–
–
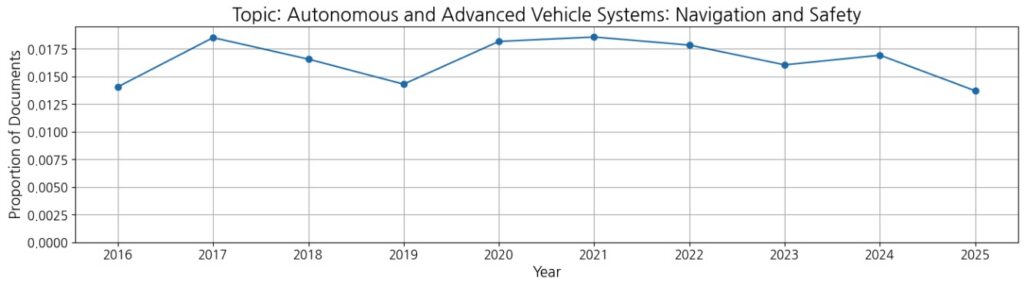
위의 그림은 최근 10년 동안 ‘Autonomous and Advanced Vehicle Systems: Navigation and Safety’ 주제와 관련하여 한국의 연구자들이 수행한 연구가 차지하는 비중의 흐름을 나타냅니다. 전반적으로, 비중이 계속 유지되고 있습니다.
–
한국 연구자들이 수행하는 세부 연구 주제들
‘Autonomous and Advanced Vehicle Systems: Navigation and Safety’ 주제에서의 한국 연구자들의 연구는 현대적인 차량에 적용되는 기술과 관련된 다양한 세부 주제들을 포함합니다. 특히, 자율 주행 기술 및 안전 시스템과 관련된 응용 분야에 초점을 맞춥니다. 또한 센서, 인공지능, 통신, 규제 등 다양한 기술적, 사회적 측면을 아우르는 포괄적인 연구 분야라고 할 수 있습니다.
자율 주행 (Autonomous Driving):
- 자율 주행 차량(ego-vehicle): 차량 스스로 주변 환경을 인식하고 경로를 계획하면서 주행하도록 하는 기술에 대한 연구입니다.
- 차선 유지 (lane-keeping): 차량이 차선을 벗어나지 않고 안정적으로 주행하도록 하는 기술입니다.
- 경로 추종 (path-following): 사전에 설정된 경로를 정확히 따라가도록 하는 기술입니다.
- 라이다 기반 시스템 (LiDAR-based): 라이다 센서를 활용하여 주변 환경을 3D로 정밀하게 매핑하고, 장애물을 감지하는 연구입니다.
운전자 보조 시스템 (Driver Assistance Systems):
- 운전자 보조 기능 (driver-assistance): 운전자의 편의와 안전을 높이는 다양한 기능들 – 예: 자동 주차, 적응형 크루즈 컨트롤 등 – 을 개발합니다.
- 인포테인먼트 (infotainment): 차량 내 정보 시스템 및 멀티미디어 시스템과 운전 보조 기능을 통합하는 주제를 연구합니다.
- 속도계 (speedometer): 디지털 속도계를 비롯한 차량 계기판의 사용자 인터페이스를 개선하는 연구입니다.
- 차선 수준의 정밀 정보 제공 (lane-level): 고정밀 지도 데이터와 연동하여 차선 수준의 정밀한 위치 정보를 제공하기 위한 연구입니다.
주행 조건 분석 (Driving Conditions):
- 야간 (nighttime), 비 오는 날 (rainy), 흐린 날 (cloudy): 악천후 및 어두운 환경에서의 자율 주행 성능을 확보하기 위한 센서 및 인공지능 알고리즘 연구입니다.
- 졸음 (drowsiness): 운전자 모니터링 시스템을 통해 운전자의 졸음운전을 감지하고 경고하는 기술을 개발합니다.
차량 간 통신 (Vehicle Communication):
- 차량 대 차량 (vehicle-to-vehicle): V2V 통신을 기반으로 차량들 사이에 주행 정보를 교환하여 충돌을 방지하거나 교통 흐름을 최적화하는 연구입니다.
- 차량 내부 통신 (inter-vehicle): 차량 내부 시스템들 사이의 효율적인 통신 프로토콜을 연구합니다.
- 공동 시뮬레이션 (co-simulation): 실제 차량과 시뮬레이션 환경을 연동하여 복합적인 시나리오를 검증합니다.
안전 및 규제 (Safety and Regulations):
- 충돌 전 (pre-crash): 충돌 위험 상황을 미리 감지하고 운전자에게 경고하거나 자동으로 제동하는 기술입니다.
- 헬멧 (helmet): 자율 주행에서의 안전을 확보하기 위한 헬멧 기술 등 탑승자 보호를 위한 연구를 포함합니다.
- 안전 관련 (safety-related): 시스템의 안전 무결성을 보장하고, 고장 발생 시에도 안전하게 작동하도록 하는 연구입니다.
- 책임 (liability): 자율 주행 시스템의 오작동 발생 시 법적 책임에 대한 연구입니다.
내비게이션 및 매핑 (Navigation and Mapping):
- 경유지 (waypoints): 자율 주행 차량의 경로 계획에 필요한 경유지를 설정하고 관리하는 기술을 연구합니다.
- 지도 기반 (map-based), 지리적 위치 (geo-location), 내비게이션 (navigational): 고정밀 지도 데이터 구축, 위치 추정 정확도 향상, 실시간 내비게이션 기능 개선에 대한 연구입니다.
인간 상호작용 (Human Interaction):
- 인간 주행 (human-driven), 인간 제어 (human-controlled): 자율 주행과 수동 주행 간의 전환, 운전자의 개입 시점 등 인간과 자율 주행 시스템 간의 상호작용을 연구합니다.
- 신경생리학적 (neurophysiological): 운전자의 생체 신호를 분석하여 운전자의 상태나 의도를 파악하는 연구입니다.
- 주의 산만 (distraction): 운전 중 주의 산만을 유발하는 요소를 줄이면서 운전자에게 필요한 정보를 효과적으로 제공하는 연구입니다.
환경 상호작용 (Environmental Interaction):
- 노변 (roadside), 지형 (terrains), 도심 환경 (urban-scene), 포장 (pavements): 다양한 도로 환경과 지형 조건에서 자율 주행 시스템의 성능을 확보하고 유지하기 위한 연구입니다.
성능 및 조작 (Performance and Maneuvering):
- 코너링 (cornering), 가속 (accelerations), 추월 (overtaking), 가속화 (speeded): 차량의 동적 성능을 최적화하고, 다양한 주행 상황에서 안정적으로 제어할 수 있도록 하는 연구입니다.
기술 및 혁신 (Technology and Innovation):
- 신경망 기반 (neural-network-based): 딥러닝 기반의 인공지능 기술을 자율 주행 시스템에 적용하는 연구입니다.
- 하드웨어 인 더 루프 (hardware-in-the-loop): 실제 하드웨어와 시뮬레이션 환경을 결합하여 시스템을 테스트하고 검증하는 기술입니다.
- 혼합 현실 (mixed-reality): 자율 주행 시뮬레이션 및 훈련에 혼합 현실 기술을 활용하는 연구입니다.
- 데이터 효율성 (data-efficient): 자율 주행 시스템의 학습에 필요한 데이터를 효율적으로 활용하는 연구입니다.
–
이 분야의 대표적인 한국 연구자들에 대한 간략한 소개
김백규 (BaekGyu Kim) : DGIST
이 연구팀은 자율주행 및 첨단 차량 시스템, 특히 내비게이션과 안전 기능에 관한 다양한 연구를 진행해왔습니다. 특히 차량이 다양한 주행 상황 속에서 주변 환경을 빠르게 인식하고, 안전하게 경로를 선택할 수 있도록 하는 기술을 개발하는 것에 중점을 두고 있습니다. 예를 들어, 차량에 탑재된 센서와 카메라가 수집한 데이터를 활용하여 도로의 형태, 주변 사물 및 위험 요소를 실시간으로 분석하고, 이를 기반으로 가상 시뮬레이션을 수행하여 주행 패턴과 충돌 가능성을 미리 예측하는 방법을 연구하였습니다. 이러한 시뮬레이션과 데이터 처리 기술은 실제 도로에서의 차량 제어와 운전자 보조 시스템(ADAS)을 보다 정밀하고 안전하게 만들 수 있게 합니다.
또한, 차량과 도로 인프라(예: Edge Server, RSU) 간의 통신을 강화하여, 오프로드 기법을 기반으로 차량이 복잡한 연산을 빠르게 처리할 수 있도록 하는 방안도 모색하고 있습니다. 이를 통해 자율주행 차량이 고속으로 주행하고 있거나 복잡한 도시 내 환경에서 주행할 때에도 안정적으로 내비게이션 경로를 결정하고, 돌발 상황에 신속하게 대응할 수 있게 됩니다. 예를 들어, 도로의 혼잡도, 기상 조건, 주행 상황 등을 실시간으로 분석하여 최적의 경로를 제공함으로써 안전성을 높이고, 교통사고 위험도 줄일 수 있습니다.
이와 같은 연구 결과들은 차량의 블라인드 스팟(사각지대) 모니터링, 차선 변경 타이밍 안내, 다수의 차량 간 협력 메커니즘, 그리고 운전자와 자율주행 시스템 간의 신뢰 형성에 관한 다양한 측면에 대한 연구에도 활용되고 있습니다. 이러한 기술은 스마트 내비게이션 앱이나 첨단 운전자 보조 시스템을 통해 보다 안전하고 편리한 주행 환경을 제공하여, 교통사고를 줄이고 운전자의 스트레스를 낮추는 데 크게 기여할 수 있습니다.
출처: https://sites.google.com/view/bgkim0110/
강창묵 (Chang Mook Kang) : Hanyang University
이 연구팀은 자율 주행 및 첨단 차량 시스템, 특히 내비게이션과 안전 체계에 관한 다양한 연구를 진행해 왔습니다. 예를 들어, 차량의 전자식 조향 장치(EPS)와 자율 주행 제어 시스템을 조율하여 차량이 실제 도로 환경에서 안전하게 차선을 유지하거나 장애물을 피할 수 있도록 하는 방법을 제시하였습니다. CARLA 시뮬레이터와 로봇 운영 체계(ROS)를 활용해 실시간으로 차량의 조향을 제어하는 시스템을 개발하면서, 실제 차량의 하드웨어와 소프트웨어가 원활하게 소통하는 방법도 연구하였습니다.
또한, 차량의 복잡한 측면 움직임(측면 제어)을 데이터 기반의 모델링 기법(예, 딥러닝의 LSTM, 동적 모드 분해 등)을 통해 정밀하게 예측하여, 다양한 도로 상황에서 차량이 보다 안전하게 주행할 수 있도록 지원하는 방법을 개발하였습니다. 이러한 연구 내용은 급격한 주행 상황 변화나 센서 오작동 시에도 차량이 안정적으로 반응하여 운전자에게 안전한 주행 환경을 제공할 수 있습니다.
센서(레이더, 카메라, GPS 등)들의 융합을 통해 차량 주변의 객체(다른 차량, 보행자 등)를 정확하게 탐지하고, 이를 기반으로 위험을 미리 예측하거나 주행 경로를 계획하는 알고리즘도 제안하였습니다. 차선 인식, 센서 고장에 대비하기 위한 안전 대책, 그리고 차량 간 협력 주행을 통한 충돌 회피와 같은 기술들이 이에 해당합니다.
이러한 기술들은 일반인의 실생활에서도 여러 방면으로 활용될 수 있습니다. 자율 주행 자동차는 도로에서 스스로 차선을 변경하거나 갑작스런 장애물을 만나도 안전하게 주행할 수 있으며, 주차 시스템 또한 자동으로 주차 공간을 인식하고 주차를 도울 수 있어 운전자의 편의성과 안전을 크게 향상시킬 수 있습니다. 또한, 이러한 시스템은 긴급 상황이나 센서가 고장이 났을 때에도 차량 자체가 안전모드를 활성화하여 실시간으로 대응할 수 있게 하여 교통사고의 위험을 크게 줄일 수 있습니다.
출처 : https://uniconlab.wixsite.com/main
전재욱 (Jae Wook Jeon) : Sungkyunkwan University
이 연구팀은 자율주행과 첨단 차량 시스템의 내비게이션 및 안전 기술 향상을 위해 다양한 연구를 진행해왔습니다. 차량 안에 장착한 카메라, LiDAR와 같은 센서를 활용하여 도로의 차선, 주변 물체, 신호등, 보행자 등을 실시간으로 인식하도록 하는 연구를 수행하고 있습니다. 이를 위해 딥러닝 기반의 물체 인식, 경로 계획, 센서 데이터 융합, 그리고 차량 제어 알고리즘 등을 활용하며, 자율주행 환경에서의 통신 지연이나 데이터 충돌 문제를 해결하기 위한 통신 프로토콜 최적화와 관련한 기술도 적용하고 있습니다.
차량이 스스로 주변의 도로 상황을 파악하여 안전하게 주행할 수 있도록 차선 검출, 물체 감지, 충돌 방지를 위한 알고리즘을 개발하였으며, 실제 주행 환경이나 시뮬레이터를 통해 알고리즘의 성능과 안전성을 검증하였습니다. 또한, 차량 내 다양한 전자제어 유닛(ECU)과 센서 간의 효율적인 데이터 통신 및 제어를 위해 소프트웨어 정의 차량(SDV)을 연구하고, 이를 통해 차량의 구조와 통신 네트워크를 최적화하는 방법도 모색하고 있습니다.
이러한 연구 결과는 일상의 차량 운전과정에서의 안전성을 높이고, 교통 체증 완화 및 긴급 상황에서 빠른 대응을 가능하게 하여 일반 시민들이 더욱 안전하고 편리하게 이동할 수 있게 합니다. 예를 들어, 자동차가 스스로 주변의 위험 요소를 인식해 즉각적으로 대응하거나, 주차와 차선 변경 같은 복잡한 상황에서도 안정적으로 운행할 수 있도록 돕는 기술들이 실제 차량에 적용된다면, 운전자와 보행자 모두에게 안전의 관점에서 큰 이점을 제공할 수 있습니다.
출처 : https://micro.skku.ac.kr/micro/index.do
심현철 (David Hyunchul Shim) : KAIST
이 연구팀은 자율주행과 첨단 차량 시스템의 내비게이션 및 안전 기술 개발에 대해 오랜 기간 집중해왔습니다. 차량이 고속 주행을 하는 상황 또는 도시 내 복잡한 교통 상황에서도 안전하게 주행할 수 있도록 다양한 기술을 개발했습니다.
예를 들어, 경주용 자율주행차에서처럼 극한의 상황에서도 센서의 오작동이나 GPS 신호 불안정성을 극복할 수 있는 강건한 위치 추정 및 칼만 필터 기반의 센서 융합 알고리즘을 제시하였고, 심지어 단시간의 측위 실패 상황에도 차량이 안정적으로 트랙을 유지할 수 있도록 탄력적인 내비게이션 시스템을 구현했습니다.
또한, 주변 차량과의 상호작용을 고려한 경로 예측 및 장애물 회피, 그리고 차선 인식과 같은 핵심 기술에 딥러닝과 시뮬레이션 기법을 적용하여, 실제 도로에서 발생할 수 있는 다양한 돌발 상황들을 대비하고 있습니다.
V2X(Vehicle-to-Everything) 기술을 활용한 연구에서는 차량 간 협력 과정에서 정보를 공유하게 하여, 도심의 복잡한 교차로나 긴급 상황에서도 더욱 안전하게 주행할 수 있는 방법도 모색했습니다.
이러한 연구 결과들은 미래의 자율주행차가 도로 위에서 스스로 최적의 경로를 찾아가며, 위험을 사전에 예측하고 피해 갈 수 있게 해주어 교통사고를 예방하거나 주행의 효율성을 크게 향상시킬 것으로 기대할 수 있습니다.
출처 : https://unmanned.kaist.ac.kr/
전문구 (Moongu Jeon) : GIST
이 연구팀은 자율주행 및 첨단 차량 시스템의 내비게이션과 안전 기능 향상을 위해 다양한 기술들을 연구하고 있습니다. 차량이 스스로 주행할 때 도로 상황을 정확하게 인식하고, 위험 요소를 미리 예측하며, 변화하는 환경(예: 악천후, 야간 주행, 복잡한 도시 환경)에서도 안전하게 움직일 수 있도록 돕는 기술들을 개발합니다.
여러 센서(일반 카메라, LiDAR, Radar, 열화상 카메라, 이벤트 카메라 등)를 동시에 활용하여 서로의 단점을 보완하는 센서 융합 기술을 연구했습니다. 예를 들어, 일반 카메라가 빛의 변화나 기상 조건에 취약할 때, 열화상 카메라나 레이더를 통해 보다 정확한 정보를 얻어 차량 주행에 반영할 수 있습니다. 이것은 마치 인간이 여러 감각을 사용하여 주변 상황을 파악하는 것과 유사합니다.
또한, 도로 차선 인식, 객체(예: 보행자 및 다른 차량) 감지, 차량 제어(예: 핸들링, 가속, 제동)와 같은 중요한 기능들을 딥러닝 기반의 모델과 고급 제어 알고리즘을 통해 구현하고, 실제 주행 환경이나 시뮬레이션(디지털 트윈 기술 등)에서 검증하는 연구도 수행합니다. 이를 통해 차량이 도로의 차선을 놓치지 않고 스스로 안전하게 주행할 수 있게 하며, 돌발 상황에 빠르게 대응할 수 있는 기반을 마련할 수 있습니다.
이러한 연구의 결과물들은 일반 운전자들의 안전과 편의를 크게 향상시킬 수 있습니다. 차량이 갑작스런 장애물을 미리 감지하여 운전자에게 경고하거나, 악천후 속에서도 안정적인 주행 경로를 찾아내어 사고 위험을 줄일 수 있습니다. 또한, 도로의 상태나 교통 표지판, 번호판 등 다양한 정보를 실시간으로 파악하여, 자율주행 차량이 사람보다 더욱 정밀하고 빠른 의사 결정을 내리도록 합니다.
출처 : https://sites.google.com/view/mlv/home